* Microsoft Robotics Developer Studio 4 is installed on Windows 7 or above OS version.
There are two ways to connect between RQ-HUNO and PC.
- Serial COM port : please check your PC "System Manager" COM port.
- Serial Baud Rate : 115200 bps
In current MSRDS 4, you can just set COM port number only, For Baud rate and other configuration is no needed.
1) Run "Visual Programming Language 4" program in MSRDS 4.
- Drag "RoboBuilder Brick" onto Diagram, or you can double click the Brick in order to add on Diagram.
"RoboBuilder Brick" service provide the many functions as below.
- Connect : To connect with Robot - ExecConfigCommand : For internal communication purpose
- ExecMotionCommand : For internal communication purpose
- ExecSensorCommand : For internal communication purpose
- ExecSmartActuatorModule : For internal communication purpose
- Pause : Pause when "Music" and "Motion" is played.
- PCControlMode : Enter into PC connection control mode
- PlayMotion : Play motion
- RBCControlMode : Enter into RBC (RQC) connection control mode
- Replay : Re-start from Pause point
- SetMotionFile : Designate motion file
- SetMusicFile : Designatte music file
- SetPlayer : Configure motion play environment
- SetPlayMotionMode : Set motion mode
- Stop : stop motion play
2) Connect Robot hardware through Brick service
- In order to connect with Robot hardware, "Connect" command needs serial COM port number.
- Add "Data" activity to input serial COM port number.
- Check serial COM port number in System Manager section, then input your COM port number in Data activity and connect to RoboBuilder Brick as below.
If you see the "Connections" window, select "Connect" in To: section.
Then, select "value" in Value section.
Now your Robot is connected with PC through COM 9, if you click "RUN" icon or
press F5 button in keyboard.
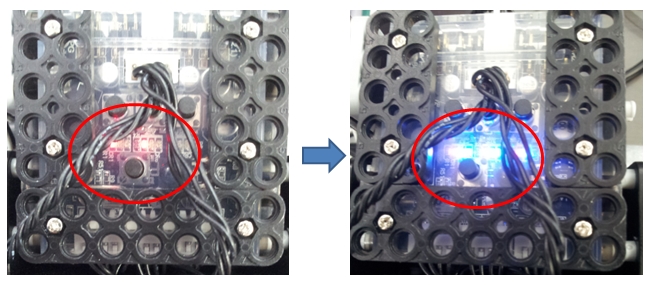
All LED of RQ-HUNO controller "RQC" panel LED turn ON, if it is connected normally.